其中,“汽车能遵循驾驶者通过转向系统及转向车轮给定的方向行驶”就是操纵性、而稳定性就是“当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶”。故二者合称“操纵稳定性”。
操纵稳定性影响汽车的操纵方便程度,更重要的是决定高速行驶的安全性,所以对于现代汽车来说是很重要的一个性能。
同时,其分析和研究也比较复杂。
第一节 概述
一、操纵稳定性包含的内容
与前几章讨论的内容不同,汽车的操纵稳定性研究内容较广泛,涉及较多的评价指标。下面对各方面研究内容做简要的介绍。
1. 转向盘角阶跃输入下的响应
汽车直线行驶时,急速转动转向盘至某一转角时,停止转动转向盘并维持此转角不变,即给汽车以转向盘角阶跃输入。
转向盘角阶跃输入在正常驾驶中很少出现,但在其输入下汽车的响应却是操纵稳定性最重要、最基础的研究内容。
2. 横摆角速度频率响应特性
转向盘转角正弦输入下,频率由0→∞变化时,汽车横摆角速度与转向盘转角的振幅比及相位差的变化规律。
横摆角速度,指的是汽车绕自身垂直轴线转动的角速度,也就是汽车行驶方向变化的速度。
从实际驾驶角度来看,这就是研究汽车绕桩行驶(俗称“钻杆儿”)时汽车响应随转向盘转动频率的变化关系。
3. 转向盘中间位置操纵稳定性
主要研究转向盘小转角、低频正弦输入下,汽车高速行驶时的操纵稳定性。因为汽车高速行驶时,驾驶者就是握紧转向盘、偶尔小幅度转动。
4. 回正性
主要研究转动转向盘后松手,汽车横摆角速度的变化。
5. 转向半径
主要研究最小转弯半径。(此内容也可认为属于汽车的通过性。)
6. 转向轻便性
评价转动转向盘轻便程度的特性。包括原地转向轻便性、低速行驶转向轻便性和高速行驶转向轻便性。
7. 直线行驶性能
要求高速行驶时维持直线行驶,尽量少的转动转向盘,并且对侧向风和侧向坡有较高的抵抗能力。
8. 典型行驶工况性能
常见的有蛇行性能(模拟汽车在车流中蜿蜒前行)、移线性能(因前方障碍而改变车道)和双移线性能―回避障碍性能(改变车道后迅速回到原车道)等。
9. 极限行驶能力
主要考察圆周行驶极限侧向加速度、抗侧翻能力和发生侧滑时的控制能力等。
二、车辆坐标系与转向盘角阶跃输入下的时域响应
1. 车辆坐标系

2. 稳态响应特性
对转向盘角阶跃输入下汽车的响应进行时间域描述,可以将整个响应划分成前后两个过程:瞬态响应和稳态响应。
转向盘角阶跃输入经短暂时间后,汽车进入等速圆周行驶,称为转向盘角阶跃输入下进入的稳态响应。
转向盘角阶跃输入前、后,直线行驶与等速圆周行驶这两个稳态运动之间的过渡过程是一种瞬态,相应的瞬态运动响应称为转向盘角阶跃输入下的瞬态响应。
即:等速直线行驶→转向盘角阶跃输入→瞬态响应→稳态响应(等速圆周行驶)。
汽车的稳态响应特性有三种类型,分别是:不足转向、中性转向和过多转向。
在转向盘转角保持不变的前提下,缓慢加速或者以不同车速等速行驶时:如果随着车速的提高汽车的转向半径增大,是不足转向;如果随着车速的提高转向半径不变,就是中性转向;如果随着车速的提高转向半径减小,则是过多转向。
普通汽车都应该具有适度的不足转向。(详见第三节。)
3. 瞬态响应
按定义,瞬态响应是处于等速直线行驶和等速圆周行驶之间的过渡过程,时间很短暂,但其变化规律较复杂。
下图是转向盘角阶跃输入下汽车的横摆角速度响应,其瞬态过程的特点如下。
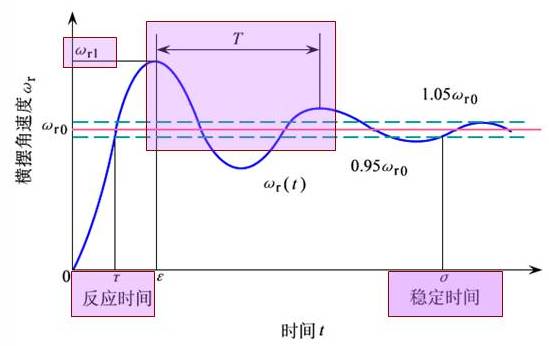
2) 执行上的误差 图中
3) 横摆角速度的波动 图中波动的圆频率ω =2π/T 。
4) 进入稳态所经历的时间 由于横摆角速度做衰减振荡,其数值收敛于稳态值
三、操纵稳定性研究的理论模型和评价方法
对操纵稳定性进行研究时,常见的理论模型有“开路系统”和“闭路系统”。
简言之,开路系统就是驾驶员和外界环境做为输入,引起车辆的响应,车辆的响应对驾驶员输入没有反馈,也就是说驾驶员不会根据车辆的实际运动对自己的操纵动作作任何调整;而闭路系统则是考虑这一反馈作用。
显然,闭路系统更加真实,更加符合实际驾驶操作情况。但开路系统的优点是模型简单,便于分析,而且由于不考虑驾驶员的反馈机制,更能体现车辆自身结构对于操纵稳定新的影响。
因此,我们采用开路系统进行研究。
评价方法,存在“主观评价”和“客观评价”。
主观评价,是通过驾驶者(实验员)的主观感觉,对汽车的性能进行评价;客观评价,就是运用现代仪器设备或进行理论分析计算,对汽车的性能进行精确、定量的评价。
由于我们采用的是开路系统研究方法,这是不考虑人的感知和反馈因素的,所以只能采用客观评价法。客观评价法也是车辆性能研究用得最多的方法,其主要优点是排除了人为经验的错觉和个体差异,能得出定量结论,结果的重复性好。
操纵稳定性的研究是比较复杂的,需要较深厚的力学和数学理论基础。本章的教学重点,主要是转向盘(前轮)角阶跃输入下汽车的稳态响应。