6
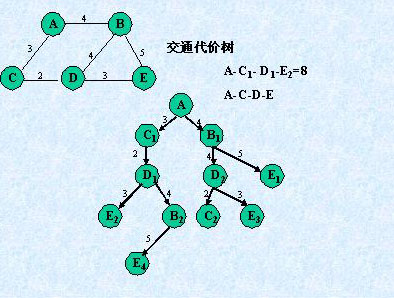
代价树的深度优先搜索 (1)基本思想:代价树的深度优先搜索是从刚扩展出的子节点中选一个代价最小的节点送入close表进行考察。代价树的深度优先搜索有可能进入无穷分支路径,因此它是不完备的。
(2)搜索过程
<1> OPEN:=S0
<2> LOOP IF OPEN=( ) THEN EXIT(FAIL)
<3> n:=FIRST(OPEN),ROMOVE(n,OPEN),ADD(n,CLOSE)
<4> IF GOAL(n) THEN EXIT(SUCCESS)
<5> IF EXPAND=( ) GO LOOP
<5> EXPAND(n)?M{mi},ADD(mi,OPEN),mi^->n,
g(xj):=g(xi)+C(xi,xj), (OPEN)|, GO LOOP