当自动控制系统受到干扰或者人为要求给定值改变,被控量就会发生变化,偏离给定值。通过系统的自动控制作用,经过一定的过渡过程,被控量又恢复到原来的稳定值或者稳定到一个新的给定值。被控量在变化过程中的过渡过程称为动态过程(即随时间而变的过程),被控量处于平衡状态称为静态或稳态。
自动控制系统最基本的要求是被控量的稳态误差(偏差)为零或在允许的范围内。对于一个好的自动控制系统来说,一般要求稳态误差在被控量额定值的2%~5%之内。
自动控制系统还应满足动态过程的性能要求,自动控制系统被控量变化的动态特性有以下几种。
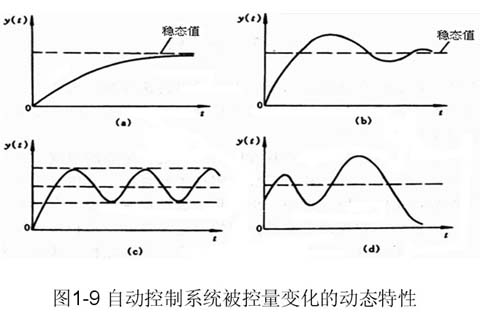
(a)单调过程 被控量y(t)单调变化(即没有“正,”,“负”的变化),缓慢地到达新的平衡状态(新的稳态值)。如图1-9(a)所示,一般这种动态过程具有较长的动态过程时间(即到达新的平衡状态所需的时间)。
(b)衰减振荡过程: 被控量y(t)的动态过程是一个振荡过程,振荡的幅度不断地衰减,到过渡过程结束时,被控量会达到新的稳态值。这种过程的最大幅度称为超调量,如图1-9(b)所示。
(c)等幅振荡过程: 被控量y(t)的动态过程是一个持续等幅振荡过程,始终不能到达新的稳态值,如图1-9(c)所示。这种过程如果振荡的幅度较大,生产过程不允许,则认为是一种不稳定的系统,如果振荡的幅度较小,生产过程可以允许,则认为是一种稳定的系统。
(d)渐扩振荡过程: 被控量y(t)的动态过程不但是一个振荡过程,而且振荡的幅值越来越大,以致会大大超过被控量允许的误差范围,如图1-9(d)所示,这是一种典型的不稳定过程,设计自动控制系统要绝对避免产生这种情况。
自动控制系统其动态过程多属于图1-9(b)的情况。控制系统的动态过程不仅要是稳定的,并且希望过渡过程时间(又称调整时间)越短越好,振荡幅度越小越好,衰减得越快越好。
综上所述,对于一个自动控制的性能要求可以概括为三方面:稳定性,快速性和准确性。
(1)稳定性。自动控制系统的最基本的要求是系统必须是稳定的,不稳定的控制系统是不能工作的。
(2)快速性。在系统稳定的前提下,希望控制过程(过渡过程)进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差(偏差)过大。合理的设计应该兼顾这两方面的要求。
(3)准确性。即要求动态误差和稳态误差都越小越好。当与快速性有矛盾时,应兼顾这两方面的要求。
|