控制系统的稳态误差,是控制精度(准确度)的一种度量,是控制系统的稳态性能指标。在实际系统中,引起稳态误差的因素是多种多样的。
本节仅仅讨论线性系统由于系统结构、参数及输入信号形式不同所引起的稳态误差。
一. 系统误差及稳态误差的概念
实际物理系统从其主反馈通道来看分为单位反馈和非单位反馈两种基本结构形式如图3.27(a)及(b)所示
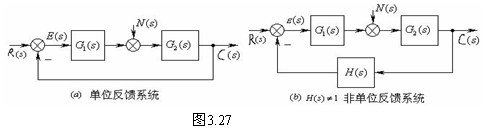
设 为希望的输出,C(s)为实际输出值。
定义:系统输出量的希望值与其实际值之差,叫做系统的误差即

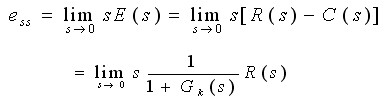
如果系统稳定,误差E(s)的稳态值又叫做系统的稳态误差。根据拉氏变换的终值定理,系统稳态误差表达式为:

对图3.27(a)单位反馈系统,输出希望值为R(s) ,所以其误差及稳态误差分别为:

式中, 。
。
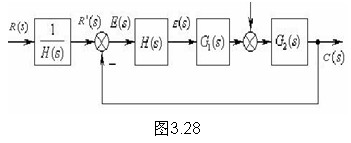
对图3.27(b)所示非单位反馈系统,将其进行结构等效变换成单位反馈如图3.28所示。则其输出希望值为 ,所以其误差及稳态误差分别为:
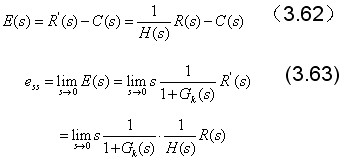
式中, 
从式(3.61)和(3.63)看出,一个线性系统的稳态误差与其结构及参数有关,与外部输入信号形式有关。下面以单位反馈系统进行讨论。
二.系统结构类型及开环增益
设单位反馈系统的开环传递函数为:
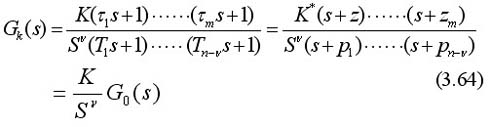
式中, ,当s→0,G0(0)=1。
,当s→0,G0(0)=1。
从式(3.61)和(3.64)看出,系统稳态误差与其开环传递函数有关,其实仅与Gk(s)中积分环节和K有关。
定义:
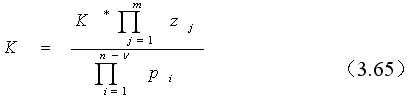
1.K定义为开环系统开环传递函数的增益,简称为系统开环增益或开环放大倍数。也就是说,在Gk(s)中,除去积分环节之外,令其s
= 0代入所得到的数值,称为开环增益。如式(3.64)中,其开环增益就是K,即
2. 式(3.65)中γ 表示开环传函积分环节的个数。工程上以积分环节个数来定义系统结构类型。 即
γ=0,系统没有积分环节,称0型系统;
γ=1,系统有一个积分环节,称Ⅰ型系统;
γ=2,系统有两个积分环节,称Ⅱ型系统。
三. 给定稳态误差的计算
控制系统对给定输入信号 作用下所产生的稳态误差,称给定稳态误差。它反映了系统对给定输入信号在稳态时的跟踪能力(跟踪精度)。下面我们应用静态误差系数法,讨论不同典型给定输入时的给定稳态误差计算。
<一> 为阶跃函数,即 ,A为一常值。
,A为一常值。
根据式(3.61)得:

式中, ,称静态位置误差系数。根据式(3.66)有:
,称静态位置误差系数。根据式(3.66)有:
对于“0”型系统,γ=0 ,所以 Kp=K,而稳态误差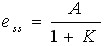 ,是一个常数。可见ess减小必须增大开环放大系数。
,是一个常数。可见ess减小必须增大开环放大系数。
对于“Ⅰ”型系统,,所以Kp=∞,稳态误差是零。同理,“Ⅱ”型系统,稳态误差也是零。
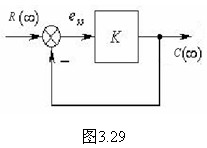 “0”型系统稳态误差为常数,从物理意义上讲,如图3.29所示的静态结构图可知,因系统没有积分环节,要维持系统恒定输出,即 “0”型系统稳态误差为常数,从物理意义上讲,如图3.29所示的静态结构图可知,因系统没有积分环节,要维持系统恒定输出,即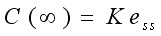
必然要存在一定恒定稳态误差,否则系统就没有输出。系统的开环增益越大,稳态误差就越小。
 “Ⅰ”型系统对为阶跃输入信号时,系统没有稳态误差,从物理意义上来看,由于有一个积分环节,系统处于稳态时起作用的仅是比例环节K及积分环节,其稳态结构图如图3.30所示。根据积分环节的功能当动态时有误差,积分器就积分,输出不断增大,误差也逐渐减小,当积分器输出值等于时,误差为零,积分器停止积分而维持原积分值等于。因而此时稳态误差为零。 “Ⅰ”型系统对为阶跃输入信号时,系统没有稳态误差,从物理意义上来看,由于有一个积分环节,系统处于稳态时起作用的仅是比例环节K及积分环节,其稳态结构图如图3.30所示。根据积分环节的功能当动态时有误差,积分器就积分,输出不断增大,误差也逐渐减小,当积分器输出值等于时,误差为零,积分器停止积分而维持原积分值等于。因而此时稳态误差为零。
<二> 为斜坡输入,即 。
。
根据式(3.61)时有:
式中 。Kv称静态速度误差系数。 。Kv称静态速度误差系数。
从式(3.67)及(3.68)不难看出:
“0”型系统,γ=0, KV=0,稳态误差ess=∞;
“Ⅰ”型系统,γ=1, KV=const, 稳态误差ess =1/KV, 与K成反比;
“Ⅱ”型系统, γ=2, KV=∞,其稳态误差ess =0;
由此可见,“0”型系统在斜坡输入作用下,其ess =∞ ,表明0型系统无法跟随斜坡输入信号。
Ⅰ型系统对斜坡输入信号的跟随稳态误差是常数。也就是说系统进入稳态以后,输入与输出信号上升速度相同,但在位置上两者之间存在稳态误差。其原因从其稳态结构图如图3.32所示看出,由于其仅有一个积分环节,为了保持系统输出量按恒速增长,必须要求积分环节输入是一常数,即稳态误差为常数。
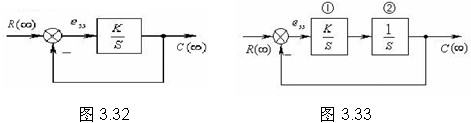
Ⅱ型系统对斜坡输入信号没有稳态误差。其稳态结构图如图3.33所示。从图3.33看出,为了保持稳态值按恒速增长,要第②个积分输入应为恒值,结果要求第①个积分器输入为零,即稳态误差为零,任何时刻都与相等。
<三> 为加速度函数输入,即 。
。
根据式(3.61)时有:

式中  。 。
Ka称静态加速度误差系数。
“0”型系统,γ=0, Ka=0,稳态误差ess=∞;
“Ⅰ”型系统,γ=1, Ka=0, 稳态误差ess=∞, 与K成反比;
“Ⅱ”型系统, γ=2, Ka=const,其稳态误差ess= 1/Ka ;
由此可见,“0”型系统在加速度函数输入作用下,其ess=∞ ,表明0型系统无法跟随加速度函数输入信号。
综合以上分析表明,系统的稳态误差与输入信号形式有关。对于一个结构确定的系统,如果给定输入形式不同,其稳态误差就不同。同时,给定稳态误差还与系统结构密切相关,如果给定输入信号一定,对不同结构的系统其稳态误差也不同。所以我们讲一个系统有稳态误差还是没有稳态误差,是针对一定系统结构及一定给定输入形式而言的。
应该指出,按静态误差系数法计算给定稳态误差,是基于拉氏变换的终值定理,只能使用给定输入为阶跃、斜坡及加速度函数或它们的线性组合。如果输入是任意的时间函数,上面方法不能使用。对于这种情况,可采用动态误差系数法进行计算。请参看有关文献。
例 3.11 已知单位反馈系统闭环传递函数为:
当 时,求ess。
时,求ess。
解:
1.由于给定稳态误差与 的结构类型及其增益有关,所以首先从 中求取 。又由于有一个零点,必定有一个相同零点。因闭环传递函数分母多项为:

从上式求得:
可见,该系统是Ⅱ型,开环增益 
2.求给定稳态误差
由于系统是线性系统,三个输入信号组和作用下系统的稳态误差计算,可以应用叠加原理,分别求出每个输入信号作用产生的稳态误差,然后将它们相加起来就可以得到总的稳态误差。根据式(3.66)、(3.68)和(3.70)有:

由此可见,输入信号中阶跃函数及斜坡函数分别作用于系统时的稳态误差都是零。只有在加速度分输入信号作用下,其稳态误差为常数。所以系统总的稳态误差为:
|