自动控制系统的稳定性,由它的闭环极点唯一确定,其动态性能与系统的闭环极点和零点在S平面上的分布有关。因此确定控制系统闭环极点和零点在S平面上的分布,特别是从已知的开环零、极点的分布确定闭环零、极点的分布,是对控制系统进行分析必须首先要解决的问题。解决的方法之一,是第三章介绍的解析法,即求出系统特征方程的根。解析法虽然比较精确,但对四阶以上的高阶系统是很困难的。
根轨迹法是解决上述问题的另一途径,它是在已知系统的开环传递函数零、极点分布的基础上,研究某―个和某些参数的变化对系统闭环极点分布的影响的一种图解方法。由于根轨迹图直观、完整地反映系统特征方程的根在S平面上分布的大致情况,通过一些简单的作图和计算,就可以看到系统参数的变化对系统闭环极点的影响趋势。这对分析研究控制系统的性能和提出改善系统性能的合理途径都具有重要意义。下面通过示例简要介绍用根轨迹分析控制系统的方法。
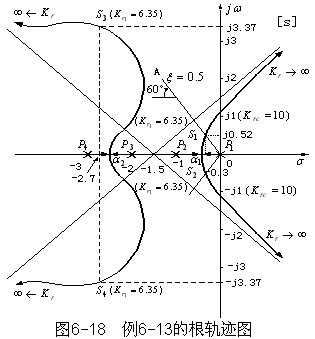
例6-13 已知单位反馈系统的开环传递函数为
试根据系统的根轨迹分析系统的稳定性和计算闭环主导极点具有阻尼比ζ=0.5 时系统的动态性能指标。
解 ⑴先根据系统的开环传递函数和绘制根轨迹的基本规则绘制出系统的根轨迹图。
系统的特征方程是
由规则一、二知该系统有四条连续且对称于实轴的根轨迹,起点分别是系统的四个开环极点,即P1=0,P2=-1,P3=-2,P4=-3;且四条根轨迹都趋向无穷远处。
由规则三知实轴上的根轨迹是由0至-1线段和由-2至-3线段。
由规则四可求出四条渐近线与实轴的交点为-1.5,它们与实轴正方向的夹角分别是
±45°和±135°。
由规则六可求出根轨迹与实轴的两个交点(分离点)分别为α1=-0.38,α1=-2.62 。
由劳斯判据求根轨迹与虚轴的交点,先根据特征方程列出劳斯表
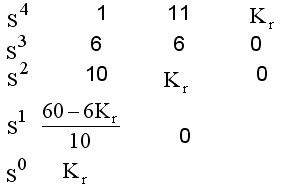
由s1行的首项系数求得Krc=10,用s=jω和Krc=10代入s2行辅助方程得到根轨迹与虚轴的交点为ωc=±1。绘制出根轨迹的大致图形如图6-18所示。
⑵系统稳定性分析
由根轨迹图知,四条根轨迹中有两条从S平面左半部穿过虚轴进入S平面右半部,它们与虚轴的交点ωc=±1,Krc=10,且交点处对应的临界开环根轨迹增益
。
由开环根轨迹增益Krc与系统开环放大系数K之间的关系,可求出系统稳定的临界开环放大系数Krc=10/6=1.67
因此,该系统稳定的条件是系统的开环放大系数K小于1.67 。
 二.
附加开环零、极点对根轨迹的影响 二.
附加开环零、极点对根轨迹的影响
1.附加开环零点对根轨迹的影响
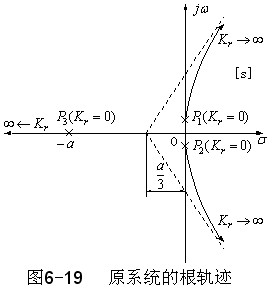
例6-14 已知系统的开环传递函数为
试用根轨迹法分析系统的稳定性。如果给该系统增加一个开环零点,试分析附加开环零点对根轨迹的影响。
解 ⑴原系统的根轨迹如图6-19所示。由于根轨迹的两条分支全部位于S平面的右半部,故该系统无论Kr为何值都是不稳定的。
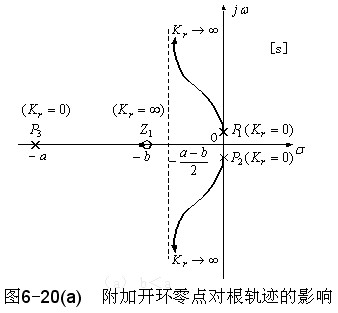
⑵如果给原系统增加一个负开环实零点 (b>0),则开环传递函数为
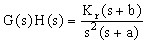
当b<a时,根轨迹的渐近线与实轴的交点为  ,它们与实轴正方向的夹角分别为90°和-90°,三条根轨迹均在S平面左半部(如图4-20(a)所示)。这时,无论开环根轨迹增益Kr为何值,系统都是稳定的。 ,它们与实轴正方向的夹角分别为90°和-90°,三条根轨迹均在S平面左半部(如图4-20(a)所示)。这时,无论开环根轨迹增益Kr为何值,系统都是稳定的。
当b>a时,根轨迹的渐近线与实轴的交点为 ,这时根轨迹的形状如图6-20(b)所示,与原系统相比较,虽然根轨迹的形状发生了变化,但仍有两条根轨迹全部位于S平面右半部,系统仍然是不稳定的。 ,这时根轨迹的形状如图6-20(b)所示,与原系统相比较,虽然根轨迹的形状发生了变化,但仍有两条根轨迹全部位于S平面右半部,系统仍然是不稳定的。
由上面的分析可以看出,附加开环零点可使原来不稳定的系统变成稳定系统,但附加零点的取值要适当,否则便达不到预期的目的。下面我们再看一个例子。
|