控制系统的运动状态和动态性能可由微分方程式描述,微分方程式是系统的一种数学模型。建立系统微分方程的一般步骤如下:
(1) 适当简化,忽略一些次要因素。
(2) 根据元件的物理或化学定律,列出相应的微分方程式。
(3) 消去中间变量,推出元件的输入量和输出变量之间关系的微分方程。
(4) 求出其它元件的方程。
(5) 从所有元件的方程式中消去中间变量,最后得到系统的输入输出微分方程。
(一)R-L-C电路
图2-1所示R-L-C电路中,R、L、C均为常值, ur(t)为输入电压, uc(t)为输出电压,输出端开路。求出uc(t)与ur(t)的微分方程。
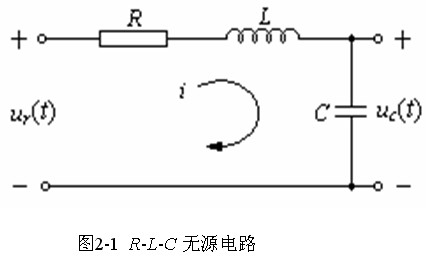
(1)根据克希霍夫定律可写出原始方程式:

(2)式中i(t)是中间变量,它与输出uc(t)有如下关系:

(3) 消去式(2.1)、式(2.2)的中间变量i(t)后,输入输出微分方程式:

或

式中T1=LC,T2=RC为电路的时间常数,单位为秒。
式(2.3)和式(2.4)是线性定常二阶线性微分方程。
|