这一节将说明如何利用MATLAB来分析控制系统。系统分析的主要内容包括如何抑制干扰、如何减小稳态误差、如何调节瞬态响应以及如何减少系统对参数变化的影响等。
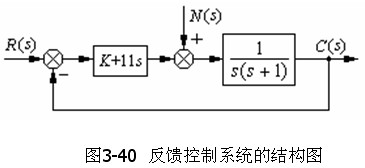
分析闭环控制系统的控制器增益K对瞬态响应的影响。图3-40是闭环控制系统的结构图。在参考输入R (s)和干扰输入N
(s)同时作用下系统的输出为
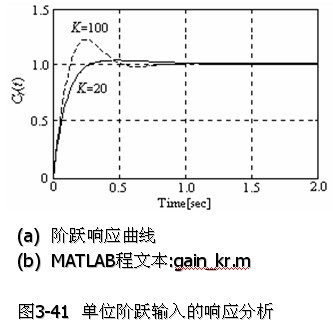
如果单纯考虑增益K对参考输入产生的瞬态响应的影响,可以预计增加K将导致超调量增加、调整时间减少和响应速度提高。在增益K=20和K=100时,系统对参考输入的单位阶跃响应曲线以及相应的MATLAB程序文本gain_kr.m示于图3-41。对比两条响应曲线,可以看出上述预计的正确性。
尽管在图中不能明显看出增大K能减少调整时间,但是这一点可以通过观察MATLAB程序的运行数据得以验证。这个例子说明了控制器增益K是如何改变系统瞬态响应的。根据以上分析,选择K=20可能是一个比较好的方案。尽管如此,在做出最后决定之前还应该考虑其他因素。
% K=20和K=100时,参考输入的单位阶跃响应:gain_kr.m
numg=[1];deng=[1 1 0];
K1=100;K2=20;
num1=[11 K1];num2=[11 K2];den=[0 1];
%简化结构图
[na,da]=series(num1,den,numg,deng);
[nb,db]=series(num2,den,numg,deng);
[numa,dena]=cloop(na,da);
[numb,denb]=cloop(nb,db);
%选择时间间隔
t=[0:0.01:2.0];
[c1,x,t]=step(numa,dena,t);
[c2,x,t]=step(numb,denb,t);
plot(t,c1,'--',t,c2)
xlabel('Time[sec]'),ylabel('Cr(t)'),grid
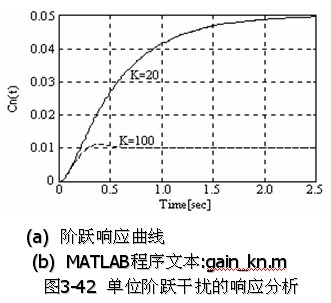 在对K做出最后选择之前,非常重要的是要研究系统对单位阶跃干扰的响应,有关结果和相应的MATLAB程序文本如图3-42所示。从中可以看到,增加K减少了单位干扰响应的幅值。对于K=20和K=100,响应的稳态值分别为0.05和0.01。对干扰输入的稳态值可按终值定理求得 在对K做出最后选择之前,非常重要的是要研究系统对单位阶跃干扰的响应,有关结果和相应的MATLAB程序文本如图3-42所示。从中可以看到,增加K减少了单位干扰响应的幅值。对于K=20和K=100,响应的稳态值分别为0.05和0.01。对干扰输入的稳态值可按终值定理求得
如果仅从抗干扰的角度考虑,选择K=100更合适。
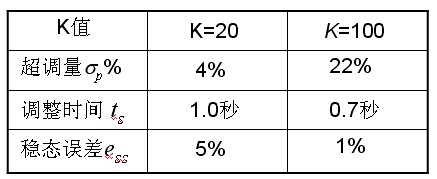
在本例中所求出的稳态误差、超调量和调整时间(2%误差)归纳于表3.7。
% K=20和K=100时,干扰输入的单位阶跃响应:gain_kn.m
numg=[1];deng=[1 1 0];
K1=100;K2=20;
num1=[11 K1];num2=[11 K2];den=[0 1];
%简化结构图
[numa,dena]=feedback(numg,deng,num1,den);
[numb,denb]=feedback(numg,deng,num2,den);
%选择时间间隔
t=[0:0.01:2.5];
[c1,x,t]=step(numa,dena,t);
[c2,x,t]=step(numb,denb,t);
plot(t,c1,'--',t,c2)
xlabel('Time[sec]'),ylabel('Cn(t)'),grid
小结
本章对控制系统分析的基本内容进行了讨论,概括地讲,就是稳定性、瞬态性能和稳态性能。
使用闭环反馈,必然带来设备及元器件的花销和随之而来的系统复杂问题,另外,对于原本稳定的开环系统,由于反馈的引入,完全可以造成闭环系统的不稳定。但是,尽管如此,反馈控制系统在各行各业得到了广泛的应用,这是由于反馈控制能够:
(1)减少被控过程G(s)中参数变化时系统的灵敏度;
(2)有利于控制和调节系统的瞬态响应性能;
(3)提高系统对干扰的抑制力;
(4)减小或消除系统的静态误差。
|