5.5.1 离散控制系统的线性差分方程
线性定常离散系统可以用后向差分方程来描述

也可用前向差分方程来描述线性定常离散控制系统

求解差分方程常用的有迭代法和Z变换法。
(1)迭代法
若已知线性定常离散控制系统的差分方程式(5-47)或式(5-48),并且给定输出序列初值,则可以利用递推关系,在计算机上一步一步计算出输出序列。
(2)Z变换法
若已知线性定常离散控制系统的差分方程描述,则根据Z变换的实位移定理,对差分方程两边取Z变换,再根据初始条件及给定输入控制信号的Z变换表达式,可求取离散控制系统输出的Z变换表达式,再求输出Z变换的Z反变换表达式,即可求取离散控制系统输出的实域表达式Y(K)。
例:已知离散系统的差分方程为
y(0) = -1, 求差分方程的解。
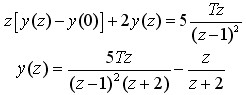
解:对差分方程取Z变换,得
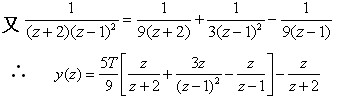
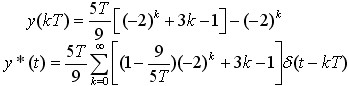
查Z变换表,有
|