一、相对稳定性
在工程应用中,由于环境温度的变化、元件的老化以及元件的更换等,会引起系统参数的改变,从而有可能破坏系统的稳定性。因此在选择元件和确定系统参数时,不仅要考虑系统的稳定性,还要求系统有一定的稳定程度,这就是自动控制系统的相对稳定性问题。
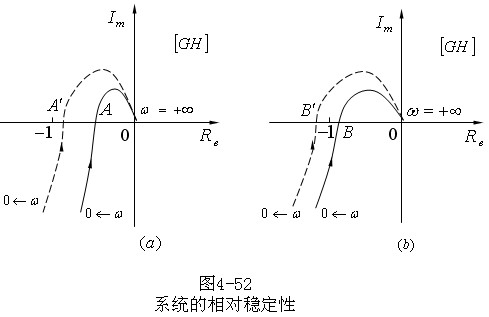
例如,图 4-52(a)和(b)所示的两个最小相位系统的开环频率特性曲线(实线)没有包围(-1,j0)点,由奈氏判据知它们都是稳定的系统,但图
4-52( a )所示系统的频率特性曲线与负实轴的交点A距离(-1,j0)点较远,图 4-52(b)所示系统的频率特性曲线与负实轴的交点
距离(-1,j0)点较近。假定系统的开环放大系统由于系统参数的改变比原来增加了百分之五十,则图4-52(a)中的A点移动到A’点,仍在点(-1,j0)右侧,系统还是稳定的;而图4-52(b)中的B点则移到(-1,j0)点的左侧(B’点),系统便不稳定了。
可见,前者较能适应系统参数的变化,即它的相对稳定性比后者好。
二、稳定裕度
通常用稳定裕度来衡量系统的相对稳定性或系统的稳定程度,其中包括系统的相角裕度和幅值裕度。
(一) 相角裕度
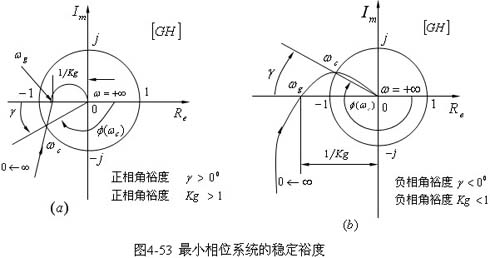
如图5―53所示,我们把GH平面上的单位圆与系统 开环频率特性曲线的 交点频率 ωc称为幅值穿越频率或剪切频率,它满足

所谓相角裕度是指幅值穿越频率所对应的相移 与-180度角的差值,即

对于最小相位系统,如果相角裕度γ> 0度 ,系统是稳定的(图4-53a),且γ值愈大,系统的相对稳定性愈好。如果相角裕度γ<
0度,系统则不稳定( 图 4-53(b)。当γ= 0度时,系统的开环频率特性曲线穿过(-1,j0)点,系统处于临界稳定状态。
相角裕度的含义 使系统达到稳定的临界状态时的开环频率特性的相角
 减小(对应稳定系统)或增加(对应不稳定系统)的数值。 减小(对应稳定系统)或增加(对应不稳定系统)的数值。
(二) 幅值裕度
如图4-53所示,我们把系统的开环频率特性曲线与GH平面负实轴的交点频率称为相位穿越频率ωg,显然它应满足
(4-126)
所谓幅值裕度Kg是指相位穿越频率所对应的开环幅频特性的倒数值,即

对于最小相位系统,当幅值裕度Kg>1( <
1 ),系统是稳定的(图4-53(a)),且Kg值愈大,系统的相对稳定性愈好。如果幅值裕度Kg< 1,(>
1),系统则不稳定( 图4-53(b))。当Kg=1时,系统的开环频率特性曲线穿过(-1,j0)点。是临界稳定状态。可见,求出系统的幅值裕度
Kg 后,便可根据 Kg值的大小来分析最小相位系统的稳定性和稳定程度。 <
1 ),系统是稳定的(图4-53(a)),且Kg值愈大,系统的相对稳定性愈好。如果幅值裕度Kg< 1,(>
1),系统则不稳定( 图4-53(b))。当Kg=1时,系统的开环频率特性曲线穿过(-1,j0)点。是临界稳定状态。可见,求出系统的幅值裕度
Kg 后,便可根据 Kg值的大小来分析最小相位系统的稳定性和稳定程度。
幅值裕度的含义 使系统到达稳定的临界状态时的开环频率特性的幅值
增大(对应稳定系统)或缩小(对应不稳定系统)的倍数。幅值裕度也可以用分贝数来表示,

因此,可根据系统的幅值裕度大于、等于或小于零分贝来判断最小相位系统是稳定、临界稳定或不稳定。
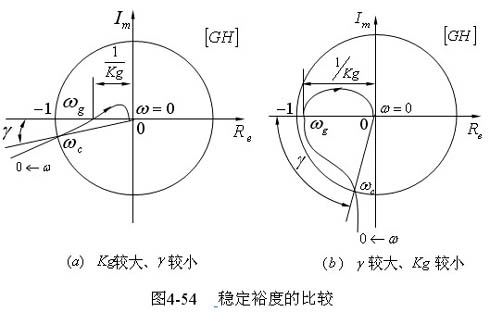
这里要指出的是,系统相对稳定性的好坏不能仅从相角裕度或幅角裕度的大小来判断,必须同时考虑相角裕度和幅角裕度。这从图4-54(a)和(b)所示的两个系统可以得到直观的说明,图4-54(a)所示系统的幅值裕度大,但相角裕度小
;相反, 图4-54(b) 所示系统的相角裕度大 ,但幅值裕度小,这两个系统的相对稳定性都不好。对于一般系统,通常要求相角裕度
=30度~60度,幅值裕度Kg≥2(6分贝)。
三、相角裕度和幅值裕度的求解方法
通常有三种求解系统相角裕度和幅值裕度的方法,即解析法、极坐标图法和伯德图法。下面通过实例进行说明。
(一) 解析法
根据系统的开环频率的开环频率特性,由式(4-124)和式(4-125)求出 相角裕度;由式(4-126)和式(4-127)求出幅值裕度,如果幅值裕度用分贝数表示,则由式(4-128)求出。
例 4-9 已知最小相位系统的开环传递函数为 
试求出该系统的幅值裕度和相角裕度。
解 系统的开环频率特性为

其幅频特性和相频特性分别是
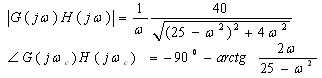
由式(4-124)令|G(jω)H(jω)|=1,得ωc=1.82
由式(4-125)得
由式(4-126),令 =-180度,得ωg=5 =-180度,得ωg=5
由式(4-127)得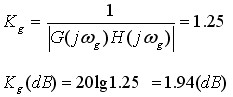
|