ЈЁ¶юЈ©ј«ЧшұкНј·Ё
ФЪGHЖҪГжЙПЧчіцПөНіөДҝӘ»·ЖөВКМШРФөДј«ЧшұкНјЈ¬ІўЧчТ»өҘО»ФІЈ¬УЙөҘО»ФІУлҝӘ»· ЖөВКМШРФөДҪ»өгУлЧшұкФӯөгөДБ¬ПЯУлёәКөЦбөДјРҪЗЗуіцПаҪЗФЈ¶ИҰГЈ»УЙҝӘ»·ЖөВКМШРФУлёәЦбҪ»өгҙҰөД·щЦө ЖөВКМШРФөДҪ»өгУлЧшұкФӯөгөДБ¬ПЯУлёәКөЦбөДјРҪЗЗуіцПаҪЗФЈ¶ИҰГЈ»УЙҝӘ»·ЖөВКМШРФУлёәЦбҪ»өгҙҰөД·щЦө
 өДө№КэөГөҪ·щЦөФЈ¶ИKgЎЈ өДө№КэөГөҪ·щЦөФЈ¶ИKgЎЈ
ФЪЙПАэЦРЈ¬ПИЧчіцПөНіөДҝӘ»·ЖөВКМШРФЗъПЯИзНј 4-55ЛщКҫЈ¬ЧчөҘО»ФІҪ»ҝӘ»·ЖөВКМШРФЗъПЯУЪAөгЈ¬Б¬ҪУ OAЈ¬ЙдПЯOAУлёәКөЦбөДјР
ҪЗјҙОӘПөНіөДПаҪЗФЈ¶ИҰГ=80¶ИЎЈҝӘ»·ЖөВКМШРФЗъПЯУлёәКөЦбөДҪ»өгЧшұкОӘЈЁ0.8Ј¬j0Ј©
УЙҙЛөГөҪПөНіөД·щЦөФЈ¶И Kg=1/0.8=1.25
ЈЁИэЈ©І®өВНј·Ё
»ӯіцПөНіөДІ®өВНјЈ¬УЙҝӘ»·¶ФКэ·щЖөМШРФУлБг·ЦұҙПЯЈЁјҙҰШЦбЈ©өДҪ»өгЖөВКҰШcЈ¬Зуіц¶ФУҰөДПаЖөМШРФУлЈӯ180¶ИПЯөДПаТЖБҝЈ¬јҙОӘПаҪЗФЈ¶И
ҰГЎЈ өұ¶ФУҰөДПаЖөМШРФО»УЪ ЁC180¶ИПЯЙП·ҪКұЈ¬ҰГ> 0¶ИЈ»·ҙЦ®Ј¬өұҰШc¶ФУҰөДПаЖөМШРФО»УЪ ЁC180¶И ПЯПВ·ҪКұЈ¬
ҰГ< 0¶ИЎЈ И»әуЈ¬УЙПаЖөВКМШРФУл-180¶ИПЯөДҪ»өгЖөВКҰШg ,Зуіц¶ФУҰ·щЖөМШРФУлБг·Ц
ұҙПЯөДІоЦөЈ¬јҙОӘ·щЦөФЈ¶ИKgөД·ЦұҙКэЎЈөұҰШg¶ФУҰөД·щЖөМШРФО»УЪБг·ЦұҙПЯПВ·ҪКұЈ¬ Ј¬Kg > 0dB·ҙЦ®Ј¬өұ ¶ФУҰөД·щЖөМШРФО»УЪБг·ЦұҙПЯЙП·ҪКұЈ¬Kg
> 0dB ЎЈ
 Аэ5ЎӘ9өДІ®өВНјИзНј4-56ЛщКҫЎЈҙУНјЦРЈ¬ҝЙЦұҪУөГөҪ·щЦөҙ©ФҪЖөВКҰШc=2,
ПаҪЗҙ©ФҪЖөВКҰШg=5Ј¬ПаҪЗФЈ¶ИҰГЎЦ80¶ИЈ¬·щЦөФЈ¶ИKg =2dBЎЈ Аэ5ЎӘ9өДІ®өВНјИзНј4-56ЛщКҫЎЈҙУНјЦРЈ¬ҝЙЦұҪУөГөҪ·щЦөҙ©ФҪЖөВКҰШc=2,
ПаҪЗҙ©ФҪЖөВКҰШg=5Ј¬ПаҪЗФЈ¶ИҰГЎЦ80¶ИЈ¬·щЦөФЈ¶ИKg =2dBЎЈ
ұИҪПЙПКцИэЦЦҪв·ЁІ»ДС·ўПЦЈә
ҪвОц·Ё ұИҪПҫ«И·Ј¬ө«јЖЛгІҪЦиёҙФУЈ¬¶шЗТ¶ФУЪИэҪЧТФЙПөДёЯҪЧПөНіЈ¬УГҪвОц·ЁКЗәЬА§ДСөДЎЈ
НјҪв·Ё ТФј«ЧшұкНјәНІ®өВНјОӘ»щҙЎөДНјҪв·ЁЈ¬ұЬГвБЛ·ұЛшөДјЖЛгЈ¬ҫЯУРјтұгЎўЦұ№ЫөДУЕөгЈ¬¶ФУЪёЯҪЧПөНіУИОӘ·ҪұгЎЈІ»№эНјҪв·ЁКЗТ»ЦЦҪьЛЖ·Ҫ·ЁЈ¬ЛщөГҪб№ыУРТ»¶ЁОуІоЈ¬ОуІоөДҙуРЎКУЧчНјөДЧјИ·РФ¶ш¶ЁЎЈІ®өВНј·ЁәНј«Чшұк·ЁЛдИ»¶јКЗНјҪв·ЁЈ¬ө«З°ХЯІ»ҪцҝЙЦұҪУҙУІ®өВНјЙП»сөГПаҪЗФЈ¶И
ҰГәН·щЦөФЈ¶ИKgЈ¬¶шЗТ»№ҝЙЦұҪУөГөҪПаУҰөД·щЦөҙ©ФҪЖөВКҰШc әНПаО»ҙ©ЖөВКҰШg ЎЈН¬КұІ®өВНјҪПј«ЧшұкНј·ҪұгЈ¬ТтҙЛФЪ№ӨіМКөјщЦРөГөҪёьОӘ№г·әөДУҰУГЎЈ
ЛДЎўОИ¶ЁФЈ¶ИУлПөНіөДОИ¶ЁРФ
З°ГжОТГЗТСҫӯҪйЙЬЈ¬ЗуіцПөНіөДОИ¶ЁФЈ¶ИҝЙТФ¶ЁБҝ·ЦОцПөНіөДОИ¶ЁіМ¶ИЎЈПВГжОТГЗНЁ№эБҪёцКҫАэҪшТ»ІҪЛөГчЎЈ
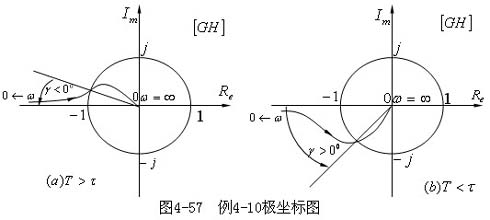
Аэ4-10 ТСЦӘЧоРЎПаО»ПөНіөДҝӘ»·ҙ«өЭәҜКэОӘ

КФ·ЦОцОИ¶ЁФЈ¶ИУлПөНіОИ¶ЁРФЦ®јдөД№ШПөЎЈ
Ҫв ёГПөНіөДҝӘ»·ЖөВКМШРФөДј«ЧшұкНј·ЦұрИзНј4-57ЈЁaЈ©ЈЁөұT>ҰУ КұЈ©әН Нј4-57ЈЁbЈ©ЈЁөұT<ҰУКұЈ©ЛщКҫЎЈУЙ
Нј4-57ЈЁaЈ©ҝЙЦӘЈ¬өұT>ҰУ КұЈ¬ПөНіөДПаҪЗФЈ¶ИҰГ<0 Ј¬УЙНј4-57ЈЁbЈ©ҝЙЦӘЈ¬өұT>ҰУ КұЈ¬ПөНіөДПаҪЗФЈ¶ИҰГ>0
ЎЈПөНіөД·щЦөФЈ¶ИУГҪвОц·ЁЗуҪвИзПВЈә
ПөНіөД·щЖөМШРФәНПаЖөМШРФ·ЦұрОӘ
Бо ,ФтУР
,ФтУР Ј¬ №К ҰШg=0 »т ҰШg=ЎЮ¶ФУҰSЖҪГжөДЧшұкФӯөгЈ¬ЙбИҘҰШg=ЎЮЈЁTЎЩҰУЈ©ЎЈ Ј¬УЙҙЛЗуіцПөНіөД·щЦөФЈ
Ј¬ №К ҰШg=0 »т ҰШg=ЎЮ¶ФУҰSЖҪГжөДЧшұкФӯөгЈ¬ЙбИҘҰШg=ЎЮЈЁTЎЩҰУЈ©ЎЈ Ј¬УЙҙЛЗуіцПөНіөД·щЦөФЈ
¶ИОӘ ЎЈҝЙјыЈ¬өұҰШg=0Ј¬ФтKg=ЎЮ>1
өұT>ҰУКұЈ¬ҰГ<0 Ј¬ёГПөНіІ»ОИ¶ЁЈ» ЎЈҝЙјыЈ¬өұҰШg=0Ј¬ФтKg=ЎЮ>1
өұT>ҰУКұЈ¬ҰГ<0 Ј¬ёГПөНіІ»ОИ¶ЁЈ»
өұT<ҰУКұЈ¬ҰГ>0 Ј¬ёГПөНіКЗОИ¶ЁөДЈ¬ҪбВЫУлАэ4-8УҰУГДОКПЕРҫЭөДҪб№ыТ»ЦВЎЈ
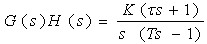
Аэ4-11 ТСЦӘ·ЗЧоРЎПаО»ПөНіөДҝӘ»·ҙ«өЭәҜКэОӘ
КФ·ЦОцёГПөНіөДОИ¶ЁРФј°ЖдУлПөНіОИ¶ЁФЈ¶ИЦ®јдөД№ШПөЎЈ
 Ҫв
ФЪТ»¶ЁөДKЦөМхјюПВЈ¬ПөНіөДҝӘ»·ЖөВКМШРФИзНј4-58ЛщКҫЎЈУЙУЪёГПөНіУРТ»ёцОӘУЪУТ°лІҝSЖҪГжөДҝӘ»·ј«өгЈЁp=1Ј© Ј¬ДОКПЗъПЯДжКұХл°ьО§ЈЁ-1,j0Ј©өгТ»ЦЬЈЁN=Јӯ1Ј©Ј¬ёщҫЭДОКПЕРҫЭЈ¬ёГПөНіОӘОИ¶ЁПөНіЎЈ Ҫв
ФЪТ»¶ЁөДKЦөМхјюПВЈ¬ПөНіөДҝӘ»·ЖөВКМШРФИзНј4-58ЛщКҫЎЈУЙУЪёГПөНіУРТ»ёцОӘУЪУТ°лІҝSЖҪГжөДҝӘ»·ј«өгЈЁp=1Ј© Ј¬ДОКПЗъПЯДжКұХл°ьО§ЈЁ-1,j0Ј©өгТ»ЦЬЈЁN=Јӯ1Ј©Ј¬ёщҫЭДОКПЕРҫЭЈ¬ёГПөНіОӘОИ¶ЁПөНіЎЈ
ө«УЙНјҪв·ЁЗуіцёГПөНіөДПаҪЗФЈ¶ИҰГ>0 Ј¬·щЦөФЈ¶ИKg<1Ј¬ХвЛөГчТФПаҪЗФЈ¶ИҰГ>0 әН·щЦөФЈ¶ИKg>1ЧчОӘЕРұр·ЗЧоРЎПаО»ПөНіОИ¶ЁРФөДТАҫЭКЗІ»ҝЙҝҝөДЎЈ
ҙУЙПГжКҫАэҝЙТФҝҙіцЈ¬¶ФУЪ·ЗЧоРЎПаО»ПөНіЈ¬І»ДЬјтөҘөШУГПөНіөДПаҪЗФЈ¶ИәН·щЦөФЈ¶ИөДҙуРЎАҙЕР¶ППөНіөДОИ¶ЁРФЎЈө«¶ФУЪЧоРЎПаО»ПөНіТФПаҪЗФЈ¶ИҰГ>0әН·щЦөФЈ¶ИKg>1ЈЁ»т
K(dB)>0Ј©ЧчОӘПөНіОИ¶ЁөДідТӘМхјюКЗҝЙҝҝөДЎЈ
|