 四.扰动量作用下系统的稳态误差计算 四.扰动量作用下系统的稳态误差计算
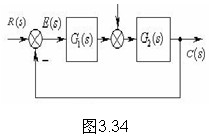
如图3.34所示系统。控制系统除承受给定输入信号作用外,还经常处于各种扰动作用之下。如:负载力矩的变动、电源电压的波动等。因此,控制系统在扰动作用下产生的稳态误差值,反映了系统在稳态过程中的抗干扰能力。
按系统误差定义有:
研究扰动作用下误差,令输入r(t)=0,则系统误差为:
给定输入为零,希望系 统输出应该为零,所以扰动量作用下的系统输出就是系统的误差。即
稳态误差为:
从式(3.73)看出,对于一个系统,扰动作用点位置不同,稳态误差就不相同。所以,扰动作用下产生的稳态误差,除与N(s)形式及其大小和
有关外,还与其作用点位置有关。
 例
3.12 如图3.34所示系统, 例
3.12 如图3.34所示系统,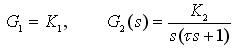
求 时系统稳态误差。 时系统稳态误差。
解:根据式(3.73)得:

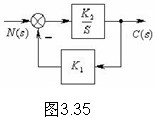
从式(3.74)看出,扰动作用下系统的稳态误差,仅仅与扰动作用点前面环节增益成反比,与扰动量大小成正比。其物理意义可从图3.35稳态结构图看出。
对于扰动信号,前向通道有一个积分环节,可保持输出是一个常值,稳态时,积分器输入必然为零。即
五.减小或消除稳态误差的措施
为了减小或消除给定稳态误差和扰动作用下的稳态误差,根据前面分析可知,可以采取以下措施。
<一>增大系统开环增益或增大扰动作用点前面前向通道增益。但开环增益增大将会影响动态性能,甚至系统变成不稳定,所以这个措施是受限制的。
<二>在系统前向通道或在扰动作用点前面的前向通道设置串联积分环节。这个措施对消除稳态误差是有效的,但是,积分环节多了很容易造成系统结构不稳定。因此,串联积分环节的措施也是受到限制的。
那么能不能有一个措施,既能减小稳态误差又不影响反馈系统的稳定性呢。“复合控制是一个比较满意的办法。
<三>复合控制
反馈控制加给定顺馈控制
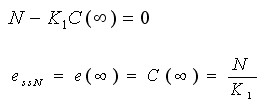
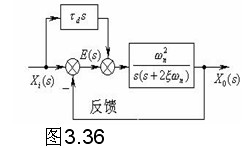
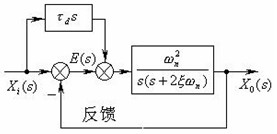
如图3.36所示的复合控制系统。下面我们应用比较方法进行分析。
没有顺馈的反馈控制系统。即 。
。
根据图3.36求得其给定误差

(2)反馈控制加给定顺馈控制的复合系统
根据图3.36得:
 整理上式又得给定误差为:
整理上式又得给定误差为:
将式(3.75)与(3.76)比较看出:两个系统特征方程相同,即

表明顺馈控制不影响反馈控制的稳定性。如果在式3.76,令

此时,给定误差E(s)=0,当然给定稳态误差也是零。这又表明加入给定顺馈控制可以减小或消除给定误差。
综合以上分析,在反馈控制基础上,加入给定顺馈控制,既减小或消除系统的给定稳态误差,又不影响反馈控制的稳定性。
 例
3.13 某复合控制系统如图所示。 例
3.13 某复合控制系统如图所示。
当 时,系统给定稳态误差为零,求顺馈环节
时,系统给定稳态误差为零,求顺馈环节 。
。
解:
1)没有给定顺馈控制时 ,反馈控制系统的给定稳态误差为:
,反馈控制系统的给定稳态误差为:
表明没有给定顺馈控制,仅依靠反馈控制在斜坡输入作用稳态误差是常数。
2)反馈控制加给定顺馈控制的复合控制。
从图求得
稳态误差为

求得 
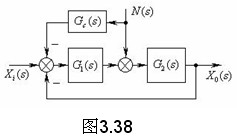 二、反馈控制加扰动量的顺馈控制的复合控制系统。 二、反馈控制加扰动量的顺馈控制的复合控制系统。
如图3.38所示复合控制系统。
没有扰动顺馈控制时系统在扰动作用下的误差为:

复合控制系统在扰动作用下的误差:
从图3.38求得: 
比较式(3.78)和(3.79)两式,扰动顺馈控制不影响反馈控制的稳定性,因其特征方程未变,令

此时系统在扰动作用下的误差为零,E(s)=0。表明扰动顺馈控制可以减小或消除扰动量作用下产生的误差。
综合以上分析,我们有以下结论:
减小系统稳态误差有三个措施
1.增大系统开环增益K;
2.在系统前向通道增加积分环节;
但是,以上两种措施都会影响系统稳定性,因而它们改善稳态误差是受到系统稳定的限制的。
3.采取复合控制。这种控制系统,顺馈既能减小系统稳态误差,又不影响反馈控制的稳定性。这是复合控制系统的一个重要特性。
应该指出,顺馈控制减小系统稳态误差的实质就是一个补偿办法。因此,只有系统有关环节参数测量准确而且保持不变,(3.77)和(3.80)才成立,其实难以做到的。
另外,如果采取全补偿,例如图3.37所示系统,有可能造成补偿装置很复杂,而且不容易实现。
|