二、传递函数的性质
从线性定常系统传递函数的定义式(2.23)可知,传递函数具有以下性质:
1.传递函数是复变量s的有理真分式函数,分子的阶数m小于或等于分母的阶数n (m≤n) ,且所有系数均为实数。
2.传递函数只取决于系统和元件的结构和参数,与外作用及初始条件无关。
3.传递函数的零、极点分布图也表征了系统的动态性能。将式(2.23)中分子多项式及分母多 项式因式分解后,写为如下形式:

式中k为常数,-z1,…,-zm为传递函数分子多项式方程的m个根,称之为传递函数的零点;-p1,…,-pn为分母多项式方程的n个根,称为传递函数的极点。
一般zi,pi可以为实数,也可为复数,且若为复数,必共轭成对出现。将零、极点标在复平面上,则得到传递函数的零极点分布图,如图2-7所示。
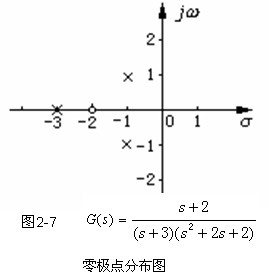
图中零点用“o”表示,极点用“X ”表示。
4. 若令式(2.23)中s = 0,则:
常称为传递系数(或静态放大系数)。从微分方程式(2.22)看,s=0相当于所有导数项为零,方程变为静态方程:

b0 /a0为输出输入的静态比。
5. 传递函数无法全面反映信号传递通路中的中间变量。多输入多输出系统各变量间的关系要用传递函数阵表示。
三、典型环节及其传递函数
控制系统从动态性能或数学模型来看,可分成为以下几种基本环节,也就是典型环节。
(一)比例环节
比例环节的传递函数为:
输出量与输入量成正比,比例环节又称为无惯性环节或放大环节。
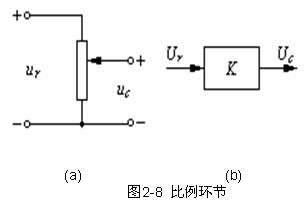
图2-8(a)所示为一电位器,输入量和输出量关系如图2-8(b)
所示。
(二)惯性环节
传递函数为如下形式的环节为
惯性环节:
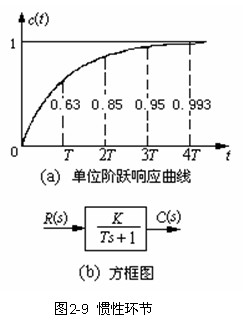 式中
K――环节的比例系数; 式中
K――环节的比例系数;
T――环节的时间常数。
当环节的输入量为单位阶跃函数时,
环节的输出量将按指数曲线上升,
具有惯性,如图
2-9(a)所示。
(三)积分环节
它的传递函数为:
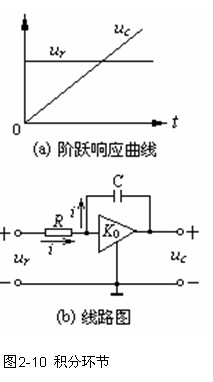
当积分环节的输入为单位阶跃函数时,
则输出为t/T,它随着时间直线增长。
T称为积分时间常数。T很大时惯性环节的
作用就近似一个积分环节。
图2-10(b)为积分调节器。 积分时间
常数为RC。
(四)微分环节
理想微分环节传递函数为:
输入是单位阶跃函数1(t)时,理想微分环节的输出为c(t)=Td(t), 是个脉冲函数。
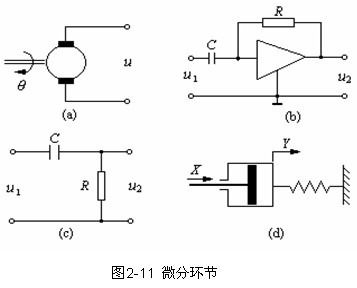
理想微分环节的实例示于图2-11(a)、(b)。(a)为测速发电机。图2-11(b)为微分运算放大器。
在实际系统中,微分环节常带有惯性,它的传递函数为:
它由理想微分环节和惯性环节组成,如图2-11(c)、(d)所示。在低频时近似为理想微分环节,否则就有式(2.28)的传递函数。
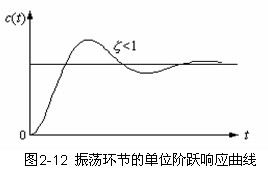
(五)振荡环节
振荡环节的传递函数为:

式中ψn ---无阻尼自然振荡频率,ψn=1/T;ζ ――阻尼比,0<ζ<1。
图2-12所示为单位阶跃函数作用下的响应曲线。
延滞环节的传递函数可求之如下:c(t)= r(t-τ)
其拉氏变换为:

式中ξ = t-τ,所以延滞环节的传递函数为:
系统具有延滞环节对系统的稳定性不利,延滞越大,影响越大。
|