|
 三、瞬态响应分析 三、瞬态响应分析
(一)一阶系统的瞬态响应
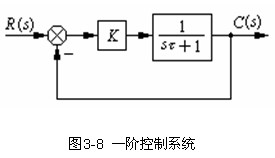
可用一阶微分方程描述其动态过程的系统,称为一阶系统。考虑如图3-8所示的一阶系统,它代表一个电机的速度控制系统,其中t
是电机的时间常数。
该一阶系统的闭环传递函数为:

当系统输入为单位阶跃信号时,即r(t)=1(t)或R(s)=1/s,输出响应的拉氏变换为

取C(s)的拉氏反变换,可得一阶系统的单位阶跃响应为

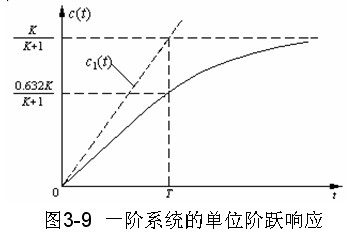
系统响应如图3-9所示。
从图中看出,响应的稳态值为
若增加放大器增益K,可使稳态值近似为1。实际上,由于放大器的内部噪声随增益的增加而增大,K不可能为无穷大。而且,线性模型也仅在工作点附近的一定范围内成立。所以,系统的稳态误差
 不可能为零。 不可能为零。
系统的时间常数为

它可定义为系统响应达到稳态值的63.2%所需要的时间。
由式(3.9),很容易找到系统输出值与时间常数T的对应关系:
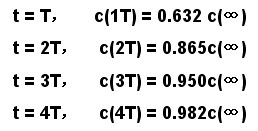
从中可以看出,响应曲线在经过3T(5%误差)或4T(2%误差)的时间后进入稳态。
如果系统响应曲线以初始速率继续增加,如图3-9中的c1(t)所示,T还可定义为c1(t)曲线达到稳态值所需要的时间。

因此
当t = T时,c1(t)曲线到达稳态值,即  ,所以 ,所以
|