1.2.4 按描述系统的数学模型不同来分
1、线性系统
由线性元件构成的系统叫线性系统。其运动方程为线性微分方程。若各项系数为常数,则称为线性定常系统。其运动方程一般形式为:

式中:u(t) ―系统的输入量;y(t) ―系统的输出量。
线性系统的主要特点是具有叠加性和齐次性,即当系统的输入分别为r1(t)和r2(t)时,对应的输出分别为c1(t)和c2(t),则当输入为r(t)=a1r1(t)+a2r2(t)时,输出量为c(t)=a1c1(t)+a2c2(t),
其中为a1、a2为常系数。
2、非线性系统
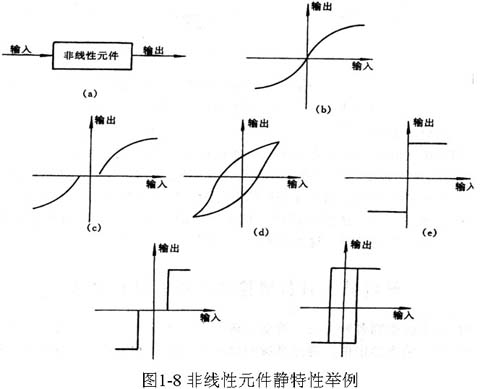
在构成系统的环节中有一个或一个以上的非线性环节时,则称此系统为非线性系统。典型的非线性特性有饱和特性、死区特性、间隙特性、继电特性、磁滞特性等。如图1-8所示。
非线性的理论研究远不如线性系统那么完整,一般只能近似的定性描述和数值计算。
严格来说,任何物理系统的特性都是非线性的。但为了研究问题的方便,许多系统在一定的条件下,一定的范围内,可以近似地看成为线性系统来加以分析研究,其误差往往在工业生产允许的范围之内。
1.2.5 其它分类方法
自动控制系统还有其他的分类方法:
(1)按系统的输入/输出信号的数量来分:有单输入/单输出系统和多输入/多输出系统。
(2)按控制系统的功能来分:有温度控制系统、速度控制系统、位置控制系统等。
(3)按系统元件组成来分:有机电系统、液压系统、生物系统。
(4)按不同的控制理论分支设计的新型控制系统来分,有最优控制系统,自适应控制系统,预测控制系统,模糊控制系统,神经网络控制系统等等。
一个系统性能将用特定的品质指标来衡量其优劣,如系统的稳定特性、动态响应和稳态特性。
|