5.6.3 离散控制系统的稳态误差
对于如图5-42所示的单位反馈的闭环离散系统的误差脉冲传递函数Ge(Z)为
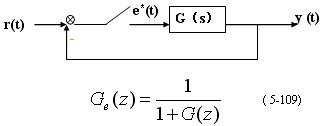
所以 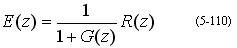
由终值定理,有
与连续系统类似,根据系统开环脉冲传递函数在Z=1的极点的个数而分为0型、1型、2型……系统。
1) 单位阶跃输入时

定义 
0型系统 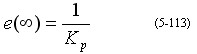
1型以上系统 
2) 单位斜坡输入
定义速度误差系数Kv为
0型系统:Kv=0 e(∞)=∞
1型系统:令 ,式中G1(z)没有z=1的极点,所以
,式中G1(z)没有z=1的极点,所以

2型以上系统 
3) 抛物线输入
此时稳态误差
定义加速度误差系数Ka为

0型、1型系统 
2型系统:令 
 式中 没有z=1的极点,则
式中 没有z=1的极点,则

3型以上系统 
例 已知离散系统的结构如图5-43所示,采样周期T=0.1秒,求系统单位阶跃和单位斜坡输入时的稳态误差。

解 : 
由于该系统开环脉冲传递函数在z=1处有一个极点,因此为1型系统,当系统输入为单位阶跃时,其稳态误差为零。
当系统输入为单位斜坡时,可求出Kv

所以,系统的稳态误差e(∞)为
|